Work experience at Matrix – Rott’s Pendulum project
We have recently had Sam Tandy join us for work experience at Matrix.
After spending a couple of days shadowing some of the key members of our team Sam was asked to create a ‘Rott’s Pendulum’ as it included some mechanics, some electronics and some firmware.
Here is a write up of his experience with us.
“This week at Matrix I worked on a project to create a ‘Rott’s pendulum’. This is a right angled main pendulum joined to a smaller, pivoting side pendulum with the two side pivots aligned horizontally at rest, causing the pendulum to display chaotic motion when given a strong push.”

“I designed the arms of the pendulum on a 2D shape drawing app (Corel Draw), and we used this design in a laser cutter to create the three arms of the pendulum out of a sheet of 5mm thick acrylic. Then, we secured bearings where the pivots were going to be. We had to use superglue to make sure the bearings stick in place because the laser cutter cut the holes slightly too big in the acrylic thanks to the additional diameter of the laser beam.
Next, we used 8mm diameter bolts, along with nylon washers and nuts, to fasten the outer arms of the pendulum to the central arm. For the right-angled non-pivoting arm, I placed large rubber washers in between the arms to cause friction and prevent it from swinging. A problem we encountered with the pivoting arm is that, since the bearings didn’t go all the way through, the nylon washer fouled on the acrylic and this caused friction so it didn’t spin smoothly. The solution to this was to use a smaller, metal washer which didn’t touch the acrylic and this meant friction was reduced.
In the centre of the pendulum is a main pivot, about which the whole pendulum swings, and we decided to use a screw through this to secure the pendulum to a wall. The problem with this was that the head of the screw was too large so when the arm of the pendulum swung, it hit the head of the screw and stopped spinning. To fix this I used a hacksaw and cut the head of the screw down so it was much smaller.
Now that the pendulum was working fine, I decided to write some code which would go onto a chip, stuck on the swinging arm along with an RGB LED bulb and an accelerometer, which would cause the bulb’s colour to change depending on how fast the pendulum swung. We wrote this code in Flowcode 7 and it meant the chip took a reading from the accelerometer, and the higher the speed, the higher the red RGB value of the LED bulb. The RGB LED and accelerometer were both Grove modules to make for easy addition to the circuitry.
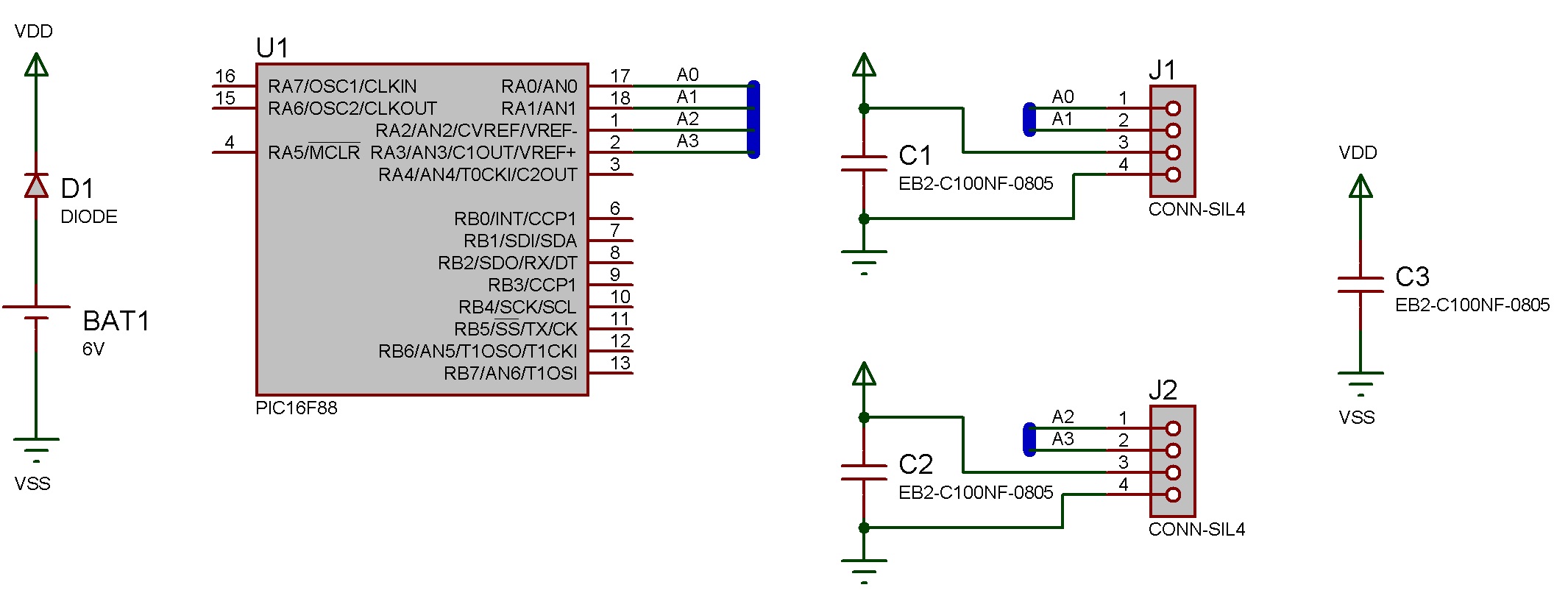
After writing the code and making sure it worked using E-blocks, I then had to solder the components (a battery holder, a chip holder, a diode and 3 capacitors) along with connecting wires, to a copper circuit board and secure this circuit board to the movable pendulum arm. However, this caused the arms to be unbalanced so I had to secure some counterweights to the opposite arm to balance them out.”
Here is a schematic of the electronics:

Here is a video of the pendulum in action. The LED response is a bit sluggish thanks to a filter, however a more up to date and responsive version of the firmware is available below:
The firmware and CAD files are available here: Rotts Pendulum
This project was inspired and based on an article by William Gurstelle in MAKE magazine:
https://makezine.com/2010/06/16/weekend-project-double-pendulum-pdf/
6,591 total views, 3 views today
Related Posts



About The Author
BenR
Embedded engineer with experience in Cybernetics (HMI), Robotics, Mechatronics, Control Systems and Communications using Microcontrollers and Microprocessors.
A very cool project! Having the LED change colours according to the velocity of the arm was a good idea.
Thanks for sharing the project files. I might have to give this a try myself.