New Motor Control Solution
At Matrix we provide rugged and reliable technology to help teach or learn in education and also to rapidly develop working systems for industry.
Our latest motors solution which will be launched as a complete 20+ hour course this July, is no different in that it aims to deliver a fully working system to help understand the various aspects of a DC motor.
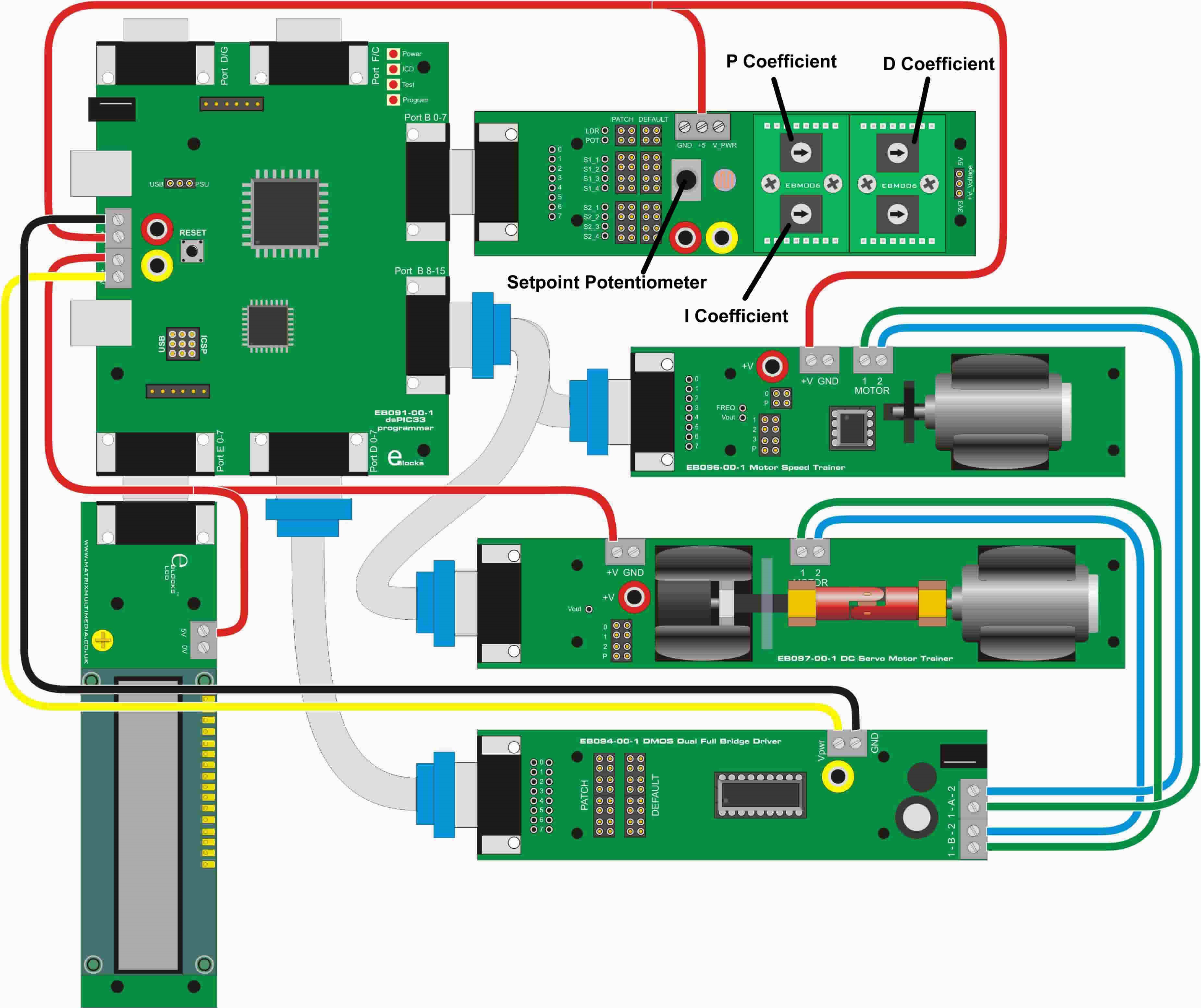
The solution includes four of our very latest new E-blocks;
- EB091: Powerful 70MIPs dsPIC Upstream Board With Ghost (launched April ’15)
- EB094: High Current FET based Motor Driver
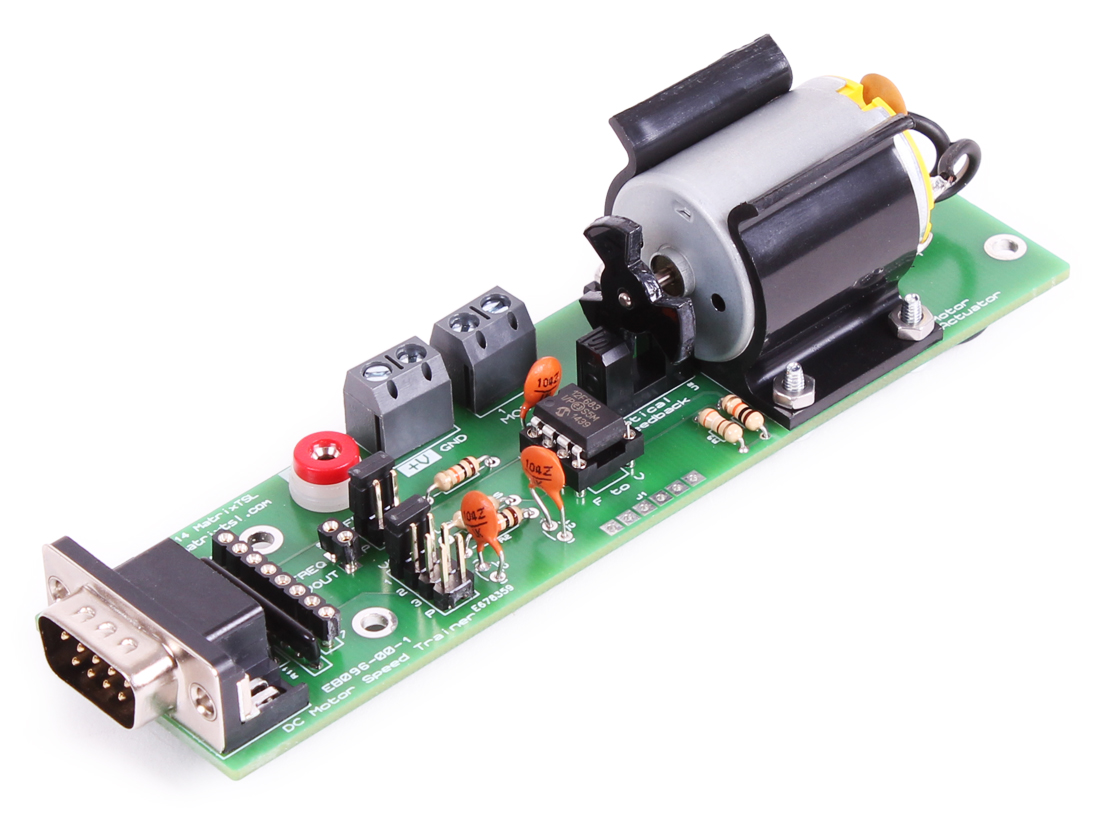
- EB096: DC Motor Speed Trainer
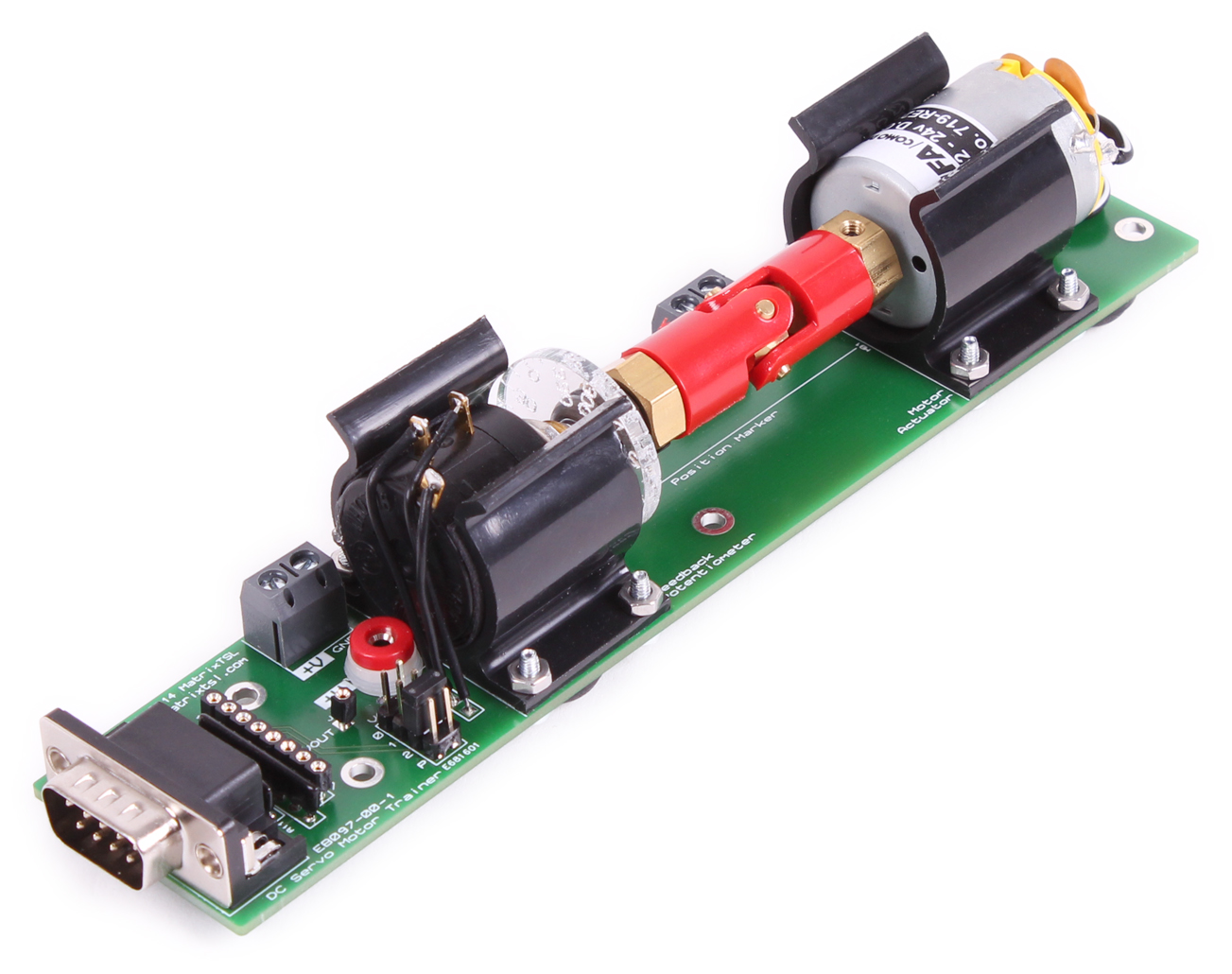
- EB097: DC Motor Servo Trainer
The EB091 provides a high speed 16-bit PIC microcontroller with tonnes of ROM, RAM and other goodies such as: USB, 16 x PWM, 4 x UART and 4 x SPI. This board is due to be released on sale in April.

The EB094 provides a large driving current capable of driving two DC motors in full bridge configuration or a single unipolar/bipolar stepper motor. The board is FET based to allow for the maximum amount of driving current to the motor coil without wasting a lot of energy as heat.

The EB096 provides a simple DC motor with it’s shaft connected to a gear which sits inside an IR beam break encoder. The output from the encoder is fed to a 12F PIC device on board the E-block which converts the encoder output frequency into a variable voltage. This makes the job of controlling the speed of the motor far easier as you can collect the speed with a simple ADC read rather than the complicated monitoring required to convert the encoder output to a speed. The digital encoder signal is also available to your upstream board allowing you to use this to monitor the speed if you wish.
The EB097 provides a second DC motor, this time with it’s output shaft connected to a three turn potentiometer and a plastic disk showing the current angle. This board replicates the internal setup of a standard hobby servo motor allowing you to explore the controller firmware we all take for granted when using servo motors.
The solution comes complete with a manual to teach the basics of DC motors, how to control them and how to utilise PID. For beginners the course can be used to teach the basics and demonstrate PID control in action. For more advanced users the course can be used to teach the intricacies of PID control such as understanding and tuning the coefficients.

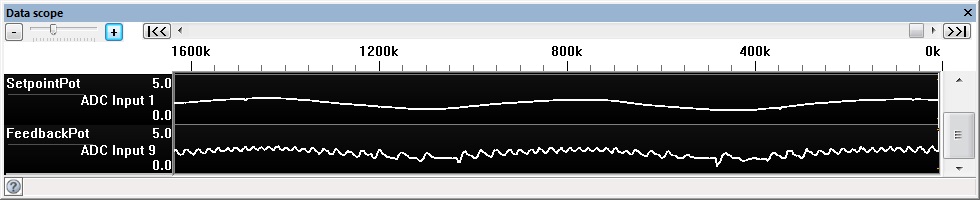
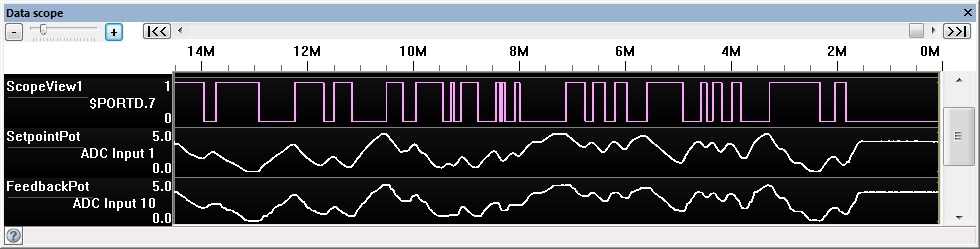
Using Ghost technology we can monitor the PID control algorithm in action as well as any other function the microcontroller might be performing.
Ghost example with badly tuned PID coefficients, the motor is tracking our control set point but badly oscillating.
Ghost example with tuned coefficients and motor direction control signal, the motor is now tracking our set point very accurately.
If you’re interested in finding out more about this solution, email our Business Development Manager, Liam Walton at liam.walton@matrixtsl.com
9,966 total views, 3 views today
Related Posts



About The Author
BenR
Embedded engineer with experience in Cybernetics (HMI), Robotics, Mechatronics, Control Systems and Communications using Microcontrollers and Microprocessors.